Regelung
Die Effektivität einer Windkraftanlage, gerade als Lademaschine, wird zum großen Teil durch eine gut eingestellte Regelung bestimmt. Denn der Generator kann nur dann effizient Strom erzeugen, wenn sich mit zunehmender Drehzahl auch die Generatorspannung erhöhen und quasi "mitlaufen" kann.
Über die Beziehung P=U*I gibt es grundsätzlich immer zwei Möglichkeiten: entweder die Leistung kommt vorwiegend aus der Spannung oder aus der Stromstärke. Je größer die Spannung desto kleiner die Stromstärke und umgekehrt. Je größer jedoch die Stromstärke, desto größer ist auch der Widerstand in den Spulen und desto größer die thermischen Verluste, die man unbedingt vermeiden möchte. Genau das passiert jedoch bei einem Direktanschluss (über einen Gleichrichter) an die Batterie. Die Spannung wird praktisch festgehalten auf Höhe der Batteriespannung, die Stromstärke steigt und der Wirkungsgrad des Generators knickt mit zunehmenden Leistungen immer weiter ein, bei gleichzeitiger Überhitzung der Spulen.
Ein MPP-Regler (Maximum Power-Point), Kennlinien- bzw. PWM-Regler (Pulsweiten-Modulation) kann hier Abhilfe schaffen. Er lässt die Generatorspannung anhand definierter Kennlinien bzw. Algorithmen mit der Drehzahl hochlaufen und transformiert sie schließlich wieder auf die Systemspannung herunter, so dass die Stromstärke und damit der Widerstand im Generator deutlich kleiner bleibt. Die Kennlinie des Reglers (d.h. mit wieviel Ampere bei welcher Spannung der Generator belastet wird) sollte dabei gut auf die Leistungsabgabe des Rotors abgestimmt sein und sollte etwas unterhalb liegen, damit das Windrad nicht ausgebremst wird.
Gute und am besten programmierbare Regler sind leider sehr teuer und gerade für kleine Windkraftanlagen an der Grenze der Wirtschaftlichkeit. Sie erhöhen zwar die Energieausbeute erheblich, führen aber gleichzeitig auch zu hohen Kosten, die jede mehr erzeugte Kilowattstunde dennoch teuer macht.
Deshalb werden hier erste Prototypen für einen sehr günstigen Laderegler entwickelt, der mittels eines programmierbaren Microcontrollers (Arduino Uno), eines Spannungswandlers und weiterer kleiner Standard-Komponenten die Energieausbeute in idealer Weise erhöhen soll.
Kennlinien-Regelung
Die einfachste Regelungs-Methode ist die Kennlinien-Regelung, die verschiedenen Generatorspannungen entsprechende Strombelastungen zuordnet. Sind diese gut an die individuellen Windradverhältnisse angepasst, können damit gute Resultate erzielt werden. Der große Vorteil liegt in der Einfachheit. Weniger elektronische Bauteile, eine einfachere Schaltung und klare Zuordnungen machen die Regelung stabil, überschaubar und leicht nachjustierbar.
Der Nachteil liegt in einer möglicherweise kleineren Effizienz gegenüber MPPT, gerade bei turbulenten Windverhältnissen.
Die Generatorbelastung wird dadurch bestimmt, dass verschiedenen Generatorspannungen konkrete Potentiometer-Werte zugeordnet werden. Je größer der Wert, desto größer ist der Stromfluss, die Ladeleistung und die Bremswirkung auf den Rotor. Diese Zuordnungen müssen vorab experimentell bestimmt werden und können je nach Windlage auch jederzeit nachjustiert werden.

Funktionsaufbau:
Der vom Generator erzeugte Wechselstrom (3 Phasen) wird zunächst über den Brücken-Gleichrichter in Gleichstrom umgewandelt, der alle weiteren Komponenten versorgt und schließlich zur Batterieladung verwendet wird.
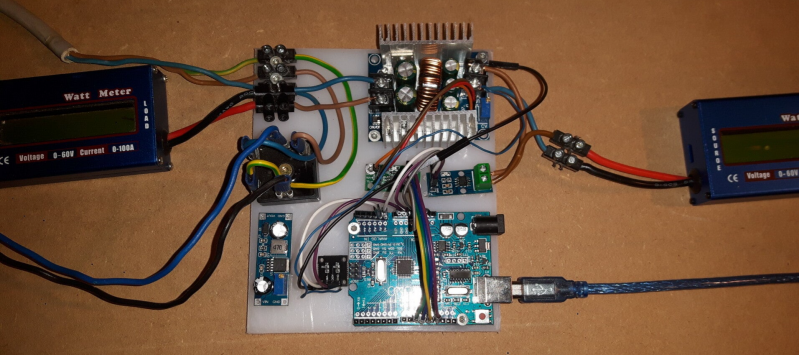
Das zentrale Element der Schaltung ist der große Step-Down-Converter in der Mitte links. Er transformiert die variable Generatorspannung auf die Ladeschlussspannung der Batterie und lässt somit den Generator möglichst effizient mit hoher Spannung und geringer Stromstärke laufen.
Am Spannungswandler befinden sich zwei Potentiometer. Mit dem einen lässt sich eine feste Ausgangsspannung einstellen (Ladeschlussspannung), mit dem anderen ein konstanter Widerstand, der den Stromfluss und damit die Belastung des Generators bzw. die Ladeleistung bestimmt. Da der Generator jedoch sehr unterschiedliche Leistungen liefert, muss die Belastung permanent angepasst werden, weshalb das ursprüngliche Potentiometer durch ein ansteuerbares, digitales Potentiometer ersetzt wird. Über den Microcontroller (Arduino Uno) lassen sich somit beliebige Widerstandswerte einstellen, durch die alle Formen der Leistungssteuerung ermöglicht werden.
Der Microcontroller selbst wird direkt vom Generator mit Strom versorgt. Da seine Versorgungsspannung nur bei 5V liegt, wird ein kleiner Step-Down-Wandler dazwischengeschaltet, der die schwankende Generatorspannung herunter transformiert und stabil hält. Der Regler wird also nur dann gestartet, wenn auch tatsächlich Strom vom Windrad produziert wird.
Nachdem die Generatorspannung den Messbereich des Microcontrollers übersteigt (0-5V) , kommt ein Spannungsteiler zum Einsatz, der die aktuelle Generatorspannung verkleinert und über den analogen Eingang des Arduino A0 messbar wird.
Sobald der Generator eine Spannung über 5V erzeugt, schaltet sich der Microcontroller ein, setzt den digitalen Widerstand auf den Startwert und ist sofort startklar. Sobald die Generatorspannung über der Batteriespannung liegt, wird das Relais 2 geschlossen und die Ladung beginnt. Sobald die Spannung unter die Akkuspannung sinkt, wird der Stromkreis zur Batterie wieder getrennt. Bei weiterer Spannungssenkung unter die Arduino Betriebsspannung schaltet der Regler komplett aus. Eine Entladung der Batterie ist somit ausgeschlossen, was bei vielen Ladereglern nicht der Fall ist. Bei (tage-) langen Windpausen können dadurch relativ große Stand-By-Verluste vermieden werden.
Arduino Programmcode:

Das gesamte Programm ist im Vergleich zur MPPT-Regelung sehr kurz und einfach. Neben den Variablen-Deklarationen und Funktionen (siehe Programmcode unten) findet der eigentliche Algorithmus innerhalb der sich permanent wiederholenden Loop-Schleife statt.

Unterscheiden sich die Zielwerte von den Ist-Werten, werden diese innerhalb einer kleinen Do-While-Schleife schrittweise solange erhöht oder vermindert, bis beide übereinstimmen.
Die Abfrage der Generatorspannung am Ende der Loop_Schleife entscheidet schließlich darüber, ob das Relais zur Batterie bei Unterschreiten der Ladespannung wieder getrennt, und ein eventueller Reset des Potentiometers durchgeführt wird.
Um im Grenzbereich ein Relais-Rasseln zu vermeiden, werden zwei leicht unterschiedliche Grenzspannungen (start-voltage, stop_voltage) verwendet.
Sobald die Generatorspannung die Bremsspannung (break_voltage) übersteigt, wird über das zweite Potentiometer der Bremswiderstand zugeschaltet.

Sobald die eingelesene Generatorspannung die festgelegte Ladespannung überschreitet, wird das Relais zur Batterie freigeschaltet. Nun erfolgt eine einfache Zuordnung der aktuellen Generatorspannung mit den entsprechenden Potentiometer-Ziel-Werten.
Hier kann der komplette Programm-Codeals PDF heruntergladen werden und mittels Copy/Paste in den Arduino Compiler eingefügt werden. Der Code ist ein erster Prototyp und wurde noch nicht unter Realbedingungen getestet.
MPPT-Regelung
Die deutlich anspruchsvollere Regelungs-Variante ist die universellen Methode des Maximum-Power-Point-Trackings (MPPT):
Dabei belastet der Regler den Generator schrittweise immer höher, bis das Maximum der aktuellen Generatorleistung erreicht ist, unabhängig davon welcher Wind (ob stark, schwach, verwirbelt oder laminar) das Windrad gerade antreibt. Bricht die Leistung etwas ein, wird der Generator solange entlastet, bis die Leistung wieder ansteigt. Dieses permanente Abtasten lässt das Windrad immer im optimalen Arbeitspunkt laufen ohne ausgebremst oder überdreht zu werden. Mit dem Ergebnis hoher Erträge und leisem, verwirbelungsarmem Lauf. Die große Kunst besteht darin, die richtige Regelgeschwindigkeit zu finden, die das Windrad nicht vorzeitig ausbremst, aber auch nicht überdrehen lässt.
Erste Versuche haben jedoch gezeigt, dass die Verwendung der Leistung als einzige Regelgröße nicht wirklich funktioniert. Denn jede Mehrbelastung führt aufgrund der Trägheit des Rotors (Schwung) zwangsläufig immer zu einer kurzfristigen Erhöhung der Leistung, auch wenn der Wind konstant bleibt oder sogar abnimmt. In Folge dessen, entscheidet der Regler noch mehr zu belasten, so dass das Windrad schließlich ausgebremst wird.
Deshalb muss unbedingt noch die Drehzahl sowie die Beschleunigungen mit in den Regelkreis integriert werden. Die Bestimmung der Drehzahl aus der Spannung ist jedoch nicht ganz einfach, da die Spannung wiederum von der Belastung abhängt.
An einer Lösung wird noch gearbeitet..
